El pipeline de datos de un inclinómetro, etapa por etapa
Suscríbase al boletín de Move Solutions
Manténgase al día sobre nuevos productos, novedades y próximos webinars.
Un inclinómetro mide la rotación en dos ejes de inclinación (φ y θ). Algunos sensores, como el inclinómetro de Move Solutions, integran un acelerómetro triaxial que añade al registro también los valores de aceleración vibratoria. La información final como "0,42 mm de deriva" es el resultado de una cadena de transformaciones aplicadas a dos números brutos: el ángulo en el eje X y el ángulo en el eje Y.
Qué sale de un inclinómetro
En cada instante de muestreo, un inclinómetro devuelve un registro mínimo: ángulo X, ángulo Y, temperatura interna del encapsulado y marca temporal UTC. Los ángulos llegan en grados, miligrados o microrradianes según el firmware.
Para el inclinómetro TLT-STD-LR-2, la repetibilidad es ±0,0008° (≈ 14 µrad) y la exactitud ±0,002° en el rango ±0,5°. Las cifras exactas deben verificarse siempre en la hoja de datos del sensor efectivamente instalado.
De ángulo a desplazamiento
La conversión de ángulo a desplazamiento lineal es geométrica (y no estática). Si el sensor está instalado a distancia L del punto de interés y rota un ángulo θ pequeño, el desplazamiento de ese punto respecto a la posición inicial es:
Δx = L · sin(θ) ≈ L · θ (con θ en radianes)
Un ejemplo. Pila de puente de 12 m de altura, sensor montado en la coronación, rotación medida 0,002°, es decir aproximadamente 35 µrad. El desplazamiento horizontal de la coronación respecto a la base vale 12 × 35 × 10⁻⁶ ≈ 0,42 mm.
"L" es el brazo mecánico real del mecanismo deformativo. Si la pila rota alrededor de una rótula plástica formada a 4 m de la base, el brazo es 8 m. Equivocarse en el brazo introduce un factor multiplicativo. Un brazo supuesto de 12 m en lugar de 8 produce un desplazamiento inflado en un 50 %. Ningún filtro aguas abajo corregirá ese error: L es un factor multiplicativo que escala cada lectura de forma proporcional. Si el brazo está sobreestimado en un 50 %, cada desplazamiento calculado estará sobreestimado en un 50 %, independientemente de cuántos filtros se apliquen antes o después.
La elección de L es una decisión de ingeniería de modelo estructural y debe documentarse en el proyecto de monitorización con el mismo cuidado con que se documenta el posicionamiento.
Compensación térmica
La temperatura desplaza el cero de un inclinómetro MEMS de forma reproducible, por lo que es factible compensar los efectos térmicos en el pipeline.
En la práctica son tres formas, en orden creciente de sofisticación:
- Lineal: θ_corr = θ_med − k · (T − T_ref). El coeficiente k proviene de la hoja de datos o de una calibración individual. Funciona bien cuando la relación θ(T) es suficientemente lineal en el intervalo operativo.
- Polinomial de segundo o tercer grado: se usa cuando las curvas de calibración muestran una no linealidad clara, típicamente por debajo de cero o por encima de 50 °C.
- Tabla de consulta interpolada: requiere una campaña de calibración térmica densa en cámara climática. Mayor precisión, mayor coste de configuración.
Una cuarta estrategia es la compensación en tiempo real con un canal de temperatura ambiente externo al encapsulado, útil cuando la inercia térmica del sensor es diferente de la de la estructura (por ejemplo un sensor en una carcasa masiva atornillada a un acero delgado expuesto al sol).
Tras la compensación de fábrica, el coeficiente residual de un sensor MEMS estructural se sitúa típicamente entre 10 y 50 µrad/°C. El valor exacto depende del modelo y de la calidad de la compensación de fábrica: debe obtenerse de la hoja de datos del sensor instalado. Parece poco hasta que una excursión térmica diaria de 20 °C produce una falsa rotación de 200-1000 µrad. Con un brazo de 10 m, son 2-10 mm de desplazamiento ficticio. Sin compensación, no sería posible distinguir los efectos térmicos de un desplazamiento real.
La línea base de campo
Cada inclinómetro tiene un offset de fábrica y un valor "cero" registrado en laboratorio. Para el monitoreo estructural, ese valor es casi siempre irrelevante.
Lo que interesa es la línea base: la media (o la mediana, más robusta frente a los outlier) de las primeras N lecturas adquiridas en obra, después de que el sensor haya alcanzado el equilibrio térmico y mecánico con la estructura. La ventana típica va de 24 a 72 horas desde la instalación, pero puede variar según el contexto y la estabilidad térmica del sitio. A partir de ese momento, cada lectura se expresa como delta respecto a la línea base registrada.
La elección elimina tres problemas de una sola vez: el error de alineación del montaje (el sensor nunca queda perfectamente perpendicular al eje teórico), el offset residual de fábrica y las pequeñas derivas iniciales del encapsulado en las primeras horas de asentamiento.
La línea base es naturalmente ciega a todo lo que ocurrió antes de la instalación. En un puente de 30 años, la monitorización ve solo la deformación de hoy en adelante. No hay modo de recuperar la historia previa a partir de un inclinómetro instalado hoy.
Filtros: media móvil, pasa bajos, Kalman
Tras la compensación térmica y la línea base, queda el ruido residual. Para fenómenos lentos (subsidencia, asentamientos de cimentación, deriva de una pila) ese ruido puede cubrir la señal real durante días. El filtrado sirve para extraer la tendencia sin amputar la dinámica.
En la práctica son tres familias, cada una con un uso específico.
Media móvil. Es una suma deslizante sobre N muestras, dividida por N. Sencilla, robusta y fácil de implementar en cualquier parte. Retrasa la señal aproximadamente N/2 muestras. Con datos a 10 minutos de muestreo, una ventana de 6-24 muestras produce tendencias diarias legibles. Funciona bien para fenómenos que evolucionan en días o semanas.
Pasa bajos Butterworth o Chebyshev. Elimina las componentes de alta frecuencia preservando la ganancia en la banda útil. Requiere elegir una frecuencia de corte coherente con la dinámica del fenómeno: demasiado alta, deja pasar el ruido; demasiado baja, atenúa la señal. Más preciso que la media móvil, menos intuitivo de configurar.
Kalman. Es un estimador estadístico óptimo cuando se conocen las estadísticas del ruido de proceso y de medición. Su valor real surge en la fusión sensorial: combinar la señal del inclinómetro con un canal de temperatura ambiente para estimar simultáneamente el estado estructural y la contribución térmica residual es una de las aplicaciones clásicas en el monitoreo estructural. Cuesta más en fase de setup (las matrices de covarianza no se adivinan), pero es la única opción cuando las fuentes de ruido son múltiples y están correlacionadas entre sí.
La desventaja del filtrado es común a todas las tipologías: filtrar reduce el ruido visible pero introduce retardo. Para un asentamiento que evoluciona en meses, un retardo de 24 horas no supone diferencia. Para un evento sísmico o un fallo repentino, hace imposible actuar a tiempo. La elección del filtro, por tanto, es función del fenómeno monitorizado.
Umbrales
Un umbral de alarma no puede copiarse de un manual. Debe derivarse del piso de ruido del sensor ya instalado en la configuración definitiva.
El procedimiento estándar tiene tres pasos:
- Adquirir 7-14 días de datos en condiciones nominales, después de cerrar la línea base.
- Calcular la desviación estándar residual tras la compensación térmica, la sustracción de la línea base y el filtrado elegido.
- Establecer dos umbrales: 3σ como atención, 6σ como crítico. Alternativamente, percentiles empíricos 99 y 99,9 si la distribución no es razonablemente gaussiana.
La ventaja es que el umbral se adapta automáticamente al sitio. Un sensor montado en una pila expuesta al viento y al sol directo puede tener un piso de ruido 2-5 veces más alto que uno instalado en un recinto técnico subterráneo.
El error típico es importar umbrales "estándar de proyecto" de una obra anterior. Las condiciones ambientales y mecánicas cambian demasiado entre un sitio y otro como para que funcione. En definitiva, un umbral defendible es un umbral calculado sobre siete días de ruido medido en ese sensor específico.
El pipeline completo, en orden
Alineando las etapas, la secuencia es esta:
- Adquisición raw: ángulo X, ángulo Y, temperatura, marca temporal.
- Compensación térmica: sustracción del término k·ΔT o equivalente polinomial.
- Sustracción de línea base: delta respecto a la ventana de referencia inicial.
- Filtrado: media móvil, pasa bajos o Kalman según el fenómeno.
- Conversión ángulo → desplazamiento: multiplicación por el brazo de palanca L.
- Comparación con umbrales y alarmas: 3σ, 6σ o percentiles.
Cada una de estas etapas puede vivir en tres lugares distintos: en el firmware del sensor, en el gateway local o en la plataforma cloud. Cuanto más se empuja el procesamiento hacia el sensor, menos ancho de banda se necesita y más robusto es el sistema frente a pérdidas de conectividad. Cuanto más se mantiene hacia la nube, más fácil es cambiar filtros y umbrales sin tocar el hardware en campo. Una plataforma como MyMove gestiona estas etapas por software, lo que permite revisar líneas base, filtros y umbrales a posteriori sin intervenir sobre el hardware en campo.
La creación de una cadena
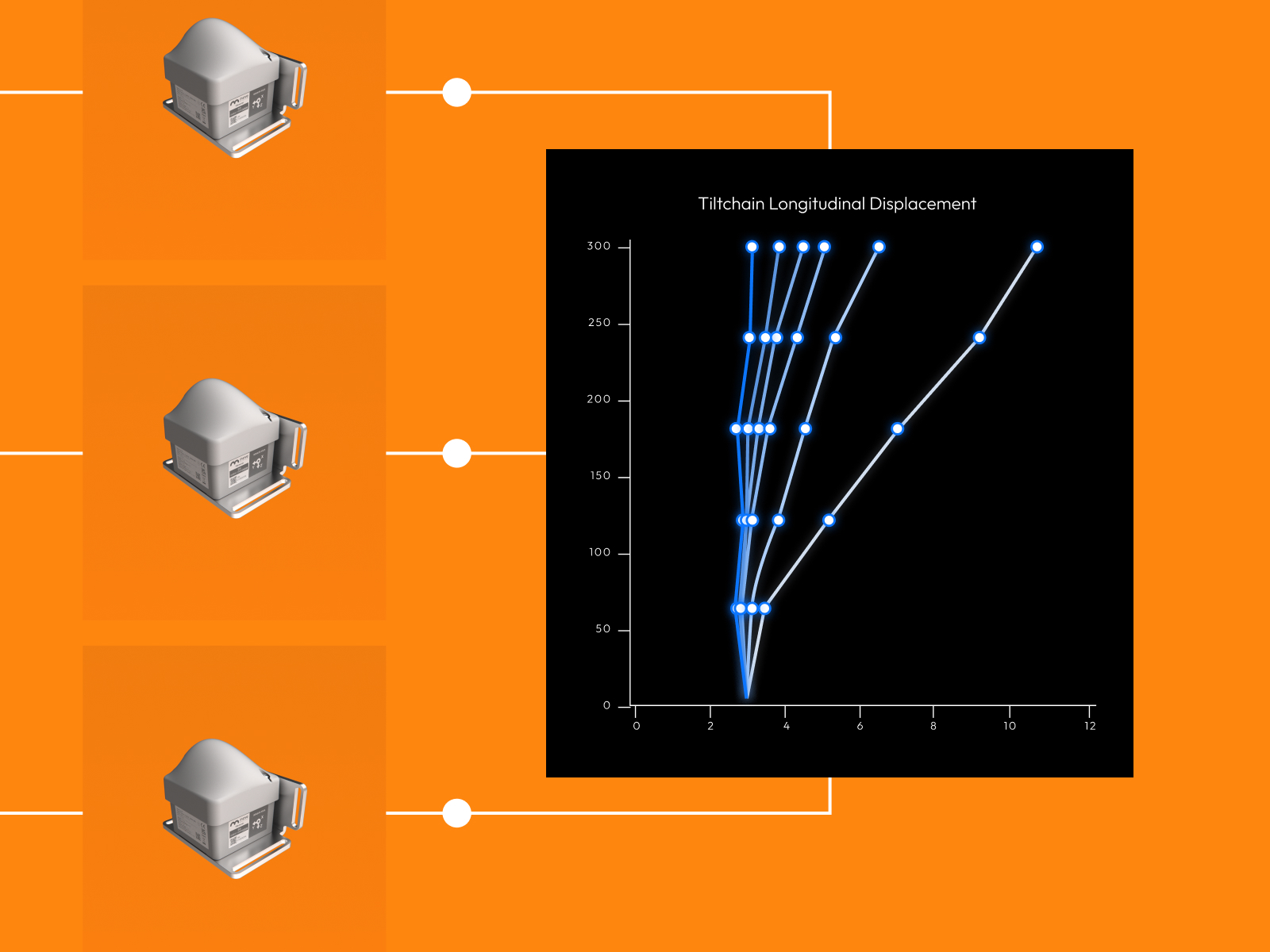
El paso siguiente para quien monitoriza estructuras extensas es del inclinómetro individual a la cadena: varios sensores en serie, integración segmento a segmento, reconstrucción de un perfil deformativo en lugar de una rotación puntual. El Tiltmeter Chain Tool de MyMove aplica la misma lógica de conversión ángulo-desplazamiento a toda la cadena de sensores, añadiendo la integración espacial segmento a segmento.
Otros artículos



Suscríbete a las novedades
Mantente al tanto de nuestras últimas innovaciones e ideas.