La pipeline dati di un inclinometro, stadio per stadio
Iscriviti alla newsletter di Move Solutions
Resta aggiornato su nuovi prodotti, novità e webinar in arrivo.
Un inclinometro misura la rotazione su due assi di inclinazione (φ e θ). Alcuni sensori, come il tiltmeter Move Solutions, integrano un accelerometro triassiale che aggiunge al record anche i valori di accelerazione vibrazionale. L'informazione finale come "0,42 mm di deriva" è il risultato di una catena di trasformazioni applicate a due numeri grezzi: l'angolo sull'asse X e l'angolo sull'asse Y.
Cosa esce da un inclinometro
A ogni istante di campionamento, un inclinometro restituisce un record minimale: angolo X, angolo Y, temperatura interna del package e timestamp UTC. Gli angoli arrivano in gradi, milligradi o microradianti a seconda del firmware.
Per l'inclinometro TLT-STD-LR-2, la ripetibilità è ±0,0008° (≈ 14 µrad) e l'accuratezza ±0,002° nel range ±0,5°. Le cifre esatte vanno sempre verificate sul datasheet del sensore installato.
Da angolo a spostamento
La conversione da angolo a spostamento lineare è geometrica (e non statica). Se il sensore è installato a distanza L dal punto di interesse e ruota di un angolo θ piccolo, lo spostamento di quel punto rispetto alla posizione iniziale è:
Δx = L · sin(θ) ≈ L · θ (con θ in radianti)
Ecco un esempio. Pila di ponte alta 12 m, sensore montato al colmo, rotazione misurata 0,002°, cioè circa 35 µrad. Lo spostamento orizzontale del colmo rispetto alla base vale 12 × 35 × 10⁻⁶ ≈ 0,42 mm.
"L" è il braccio meccanico reale del meccanismo deformativo. Se la pila ruota attorno a una cerniera plastica formatasi a 4 m dalla base, il braccio è 8 m. Sbagliare il braccio introduce un fattore moltiplicativo. Un braccio ipotizzato 12 m al posto di 8 produce uno spostamento gonfiato del 50%. Nessun filtro a valle correggerà quell'errore: L è un fattore moltiplicativo che scala ogni lettura in modo proporzionale. Se il braccio è sovrastimato del 50 %, ogni spostamento calcolato sarà sovrastimato del 50 %, indipendentemente da quanti filtri si applicano prima o dopo.
La scelta di L è una decisione ingegneristica di modello strutturale e va documentata nel progetto di monitoraggio con la stessa cura con cui si documenta il posizionamento.
Compensazione termica
La temperatura sposta lo zero di un inclinometro MEMS in modo riproducibile, per ciò è fattibile compensare gli effetti termici nella pipeline.
In pratica sono tre forme, in ordine di sofisticazione crescente:
- Lineare: θ_corr = θ_mis − k · (T − T_rif). Il coefficiente k viene dal datasheet o da una calibrazione individuale. Funziona bene quando il legame θ(T) è sufficientemente lineare nell'intervallo operativo.
- Polinomiale di secondo o terzo grado: si usa quando le curve di calibrazione mostrano una non-linearità chiara, tipicamente sotto zero o sopra i 50 °C.
- Lookup table interpolata: richiede una campagna di taratura termica fitta in camera climatica. Maggior precisione, maggior costo di set-up.
Una quarta strategia è la compensazione live con un canale di temperatura ambientale esterno al package, utile quando l'inerzia termica del sensore è diversa da quella della struttura (per esempio un sensore in un involucro massivo bullonato a un acciaio sottile esposto al sole).
Dopo la compensazione di fabbrica, il coefficiente residuo di un sensore MEMS strutturale si colloca tipicamente fra 10 e 50 µrad/°C. Sembra poco fino al momento in cui un'escursione giornaliera di 20 °C produce una falsa rotazione di 200-1000 µrad. Su un braccio di 10 m, sono 2-10 mm di spostamento fittizio. Senza compensazione, non sarebbe possibile distinguere gli effetti termici da uno spostamento vero.
La baseline di fabbrica
Ogni inclinometro ha un offset di fabbrica e un valore "zero" registrato in laboratorio. Per il monitoraggio strutturale, quel valore è quasi sempre irrilevante.
Quello che interessa è la baseline: la media (o la mediana, più robusta agli outlier) delle prime N letture acquisite in opera, dopo che il sensore ha raggiunto l'equilibrio termico e meccanico con la struttura. La finestra tipica va da 24 a 72 ore dall'installazione, ma può variare a seconda del contesto e della stabilità termica del sito. Da quel momento in poi, ogni lettura è espressa come delta rispetto alla baseline registrata.
La scelta elimina tre problemi in un colpo solo: l'errore di assetto del montaggio (il sensore non è mai perfettamente perpendicolare all'asse teorico), l'offset di fabbrica residuo, e le piccole derive iniziali del package nelle prime ore di assestamento.
La baseline è naturalmente cieca rispetto a tutto ciò che è successo prima dell'installazione. Su un ponte di 30 anni, il monitoraggio vede solo la deformazione da oggi in avanti. Non c'è modo di recuperare la storia pregressa da un inclinometro installato oggi.
Filtri: media mobile, passa-basso, Kalman
Dopo compensazione termica e baseline, resta il rumore residuo. Per fenomeni lenti (subsidenza, cedimenti di fondazione, deriva di una pila) quel rumore può coprire il segnale vero per giorni. Il filtraggio serve a estrarre la tendenza senza amputare la dinamica.
In pratica sono tre famiglie, ciascuna con un uso specifico.
Media mobile. È una somma scorrevole su N campioni, poi divisa per N. È semplice, robusta e facile da implementare ovunque. Ritarda il segnale di circa N/2 campioni. Su dati a 10 minuti di campionamento, una finestra di 6-24 campioni produce trend giornalieri leggibili. Funziona bene per fenomeni che evolvono in giorni o settimane.
Passa-basso Butterworth o Chebyshev. Rimuove le componenti ad alta frequenza preservando il guadagno in banda utile. Richiede di scegliere una frequenza di taglio coerente con la dinamica del fenomeno: troppo alta, passa il rumore; troppo bassa, attenua il segnale. Più preciso della media mobile, meno intuitivo da configurare.
Kalman. È uno stimatore statistico ottimo quando si conoscono le statistiche del rumore di processo e di misura. Il suo valore reale emerge nella sensor fusion: fondere il segnale dell'inclinometro con un canale di temperatura ambiente per stimare contemporaneamente lo stato strutturale e il contributo termico residuo è una delle applicazioni classiche nel monitoraggio strutturale. Costa di più in fase di setup (le matrici di covarianza non si indovinano), ma è l'unica opzione quando le fonti di rumore sono multiple e correlate fra loro.
Lo svantaggio del filtraggio è comune a tutte le tipologie: filtrare riduce il rumore visibile ma introduce ritardo. Su un settlement che evolve in mesi, un ritardo di 24 ore non fa differenza. Su un evento sismico o un cedimento improvviso, rende impossibile agire in tempo. La scelta del filtro, quindi, è funzione del fenomeno monitorato.
Soglie
Una soglia di allarme non può essere copiata da un manuale. Deve derivare dal noise floor del sensore già installato nella configurazione definitiva.
La procedura standard ha tre passi:
- Acquisire 7-14 giorni di dati in condizioni nominali, dopo aver chiuso la baseline.
- Calcolare la deviazione standard residua dopo compensazione termica, sottrazione baseline e filtraggio scelto.
- Impostare due soglie: 3σ come attenzione, 6σ come critica. In alternativa, percentili empirici 99 e 99,9 se la distribuzione non è ragionevolmente gaussiana.
Il vantaggio è che la soglia si adatta automaticamente al sito. Un sensore montato su una pila esposta al vento e al sole diretto può avere un noise floor 2-5 volte più alto di uno installato in un vano tecnico interrato.
L'errore tipico è importare soglie "standard di progetto" da un cantiere precedente. Le condizioni ambientali e meccaniche cambiano troppo fra un sito e l'altro perché funzioni. In sostanza, una soglia difendibile è una soglia calcolata su sette giorni di rumore misurato su quel sensore specifico.
La pipeline completa, in ordine
Mettendo in fila gli stadi, la sequenza è questa:
- Acquisizione raw: angolo X, angolo Y, temperatura, timestamp.
- Compensazione termica: sottrazione del termine k·ΔT o equivalente polinomiale.
- Sottrazione baseline: delta rispetto alla finestra di riferimento iniziale.
- Filtraggio: media mobile, passa-basso o Kalman a seconda del fenomeno.
- Conversione angolo → spostamento: moltiplicazione per il braccio di leva L.
- Confronto con soglie e allarmi: 3σ, 6σ o percentili.
Ciascuno di questi stadi può vivere in tre posti diversi: sul firmware del sensore, sul gateway locale, o sulla piattaforma cloud. Più si spinge il processing verso il sensore, meno banda serve e più il sistema è robusto a perdite di connettività. Più si tiene verso il cloud, più è facile cambiare filtri e soglie senza toccare l'hardware in campo. Una piattaforma come MyMove gestisce questi stadi lato software, il che permette di rivedere baseline, filtri e soglie a posteriori senza intervenire sull'hardware in campo.
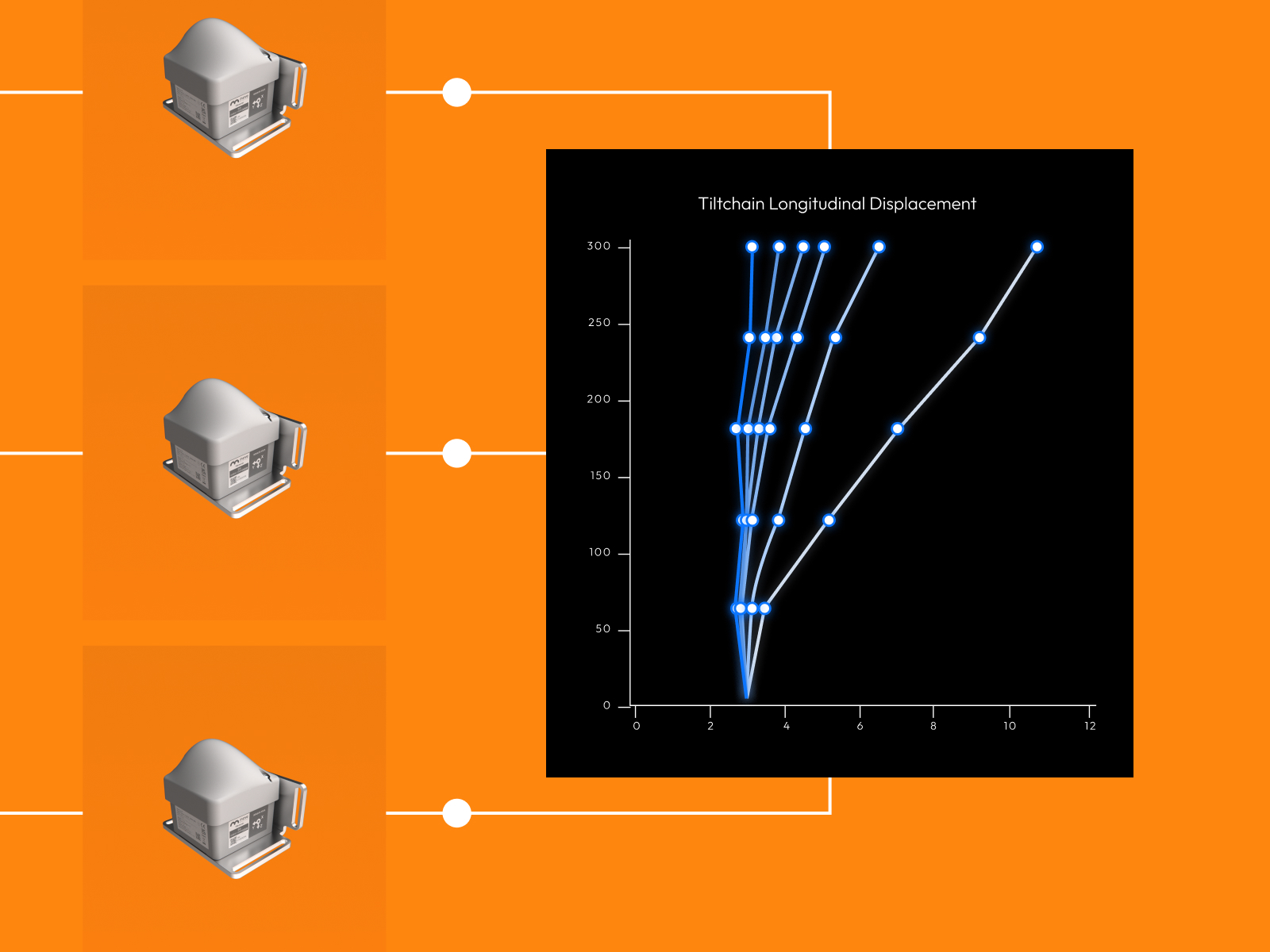
La creazione di una catena
Il passaggio successivo per chi monitora strutture estese è dal singolo inclinometro alla catena: più sensori in serie, integrazione segmento per segmento, ricostruzione di un profilo deformativo invece di una rotazione puntuale. Il Tiltmeter Chain Tool di MyMove applica la stessa logica di conversione angolo-spostamento all'intera catena di sensori, aggiungendo l'integrazione spaziale segmento per segmento.
Altri articoli



Iscriviti agli aggiornamenti
Rimani aggiornato sulle nostre ultime innovazioni e approfondimenti.